
装置提供单以太网或双以太网通信方式接入各种自动化系统。
通过装置外部配件——远方/就地切换把手,可改变装置开关量输入端子 X2:3 的二进制状态。相
应地,装置分别进入“远方”(高电平)和“就地”(零电平)两种运行模式。装置运行于“远方”模式下,
主站系统通过装置可遥控断路器、投退装置软压板及修改定值。此时这些功能的装置侧当地操作均被
闭锁。装置运行于“就地”模式下,通过装置键盘可就地投退软压板及修改定值。远方/就地切换把手同

1.7.4 通信与规约
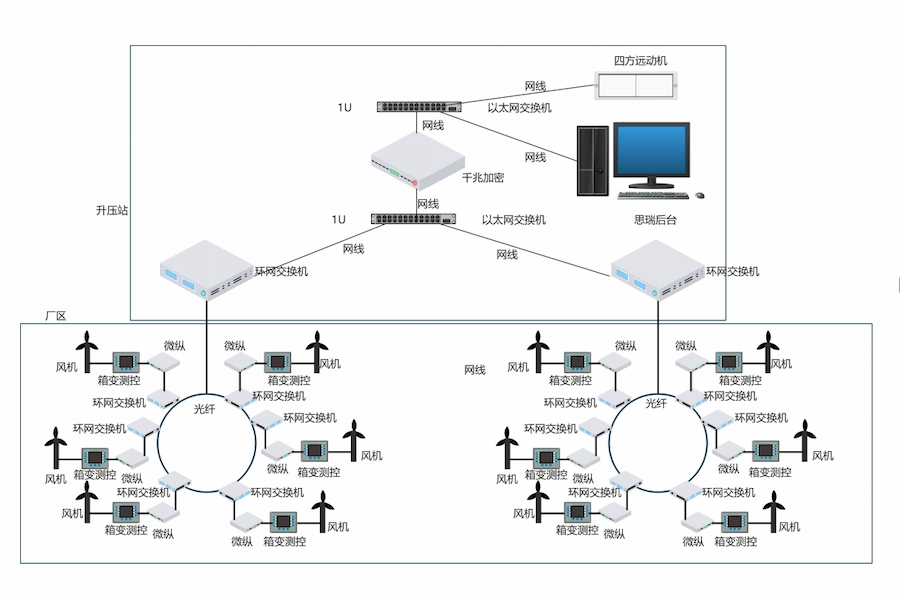
a)通信方式
装置标准配置具有 2 个与自动化系统通信的 100BASE-T 标准以太网接口,装置可接入单网系统
或双网系统运行。单以太网运行默认采用 A 网口接入,双以太网运行则 A、B 网口同时接入。在菜单“\
运行设置\HMI 设置”下设置相应通信端口地址。通信介质建议均采用以太网用屏蔽双绞五类线 STP5。
当装置以太网通信接入自动化系统时,多台装置依靠接入集线器(HUB)相对集中,与自动化系
统主站连接。如果不是采用交换式集线器,接入的装置数量好不要超过该集线器可接入数量的 2/3,
以装置上送信息的实时性。
2.1 差动速断
当任一相差动电流大于差动速断整定值时,动作于总出口继电器。用于在变压器差动区发生严重
故障情况下快速切除变压器。差动速断定值应能躲过外部故障的大不平衡电流和空投变压器时的励
磁涌流,一般取 6~12 倍的额定电流。
总出口动作后输出 8 副接点,分别为(X3:1,X3:2)、(X3:3,X3:4)、(X3:5,X3:6)、 (X3:11,X3:12)、
(X6:9, X6:10)、(X6:11, X6:12)、(X6:13, X6:14)、(X6:15, X6:16)。(后 4 副接点需选装 DIO 模件)
2.2 比率差动元件
采用常规比率差动原理,其动作方程如下:
Id > Icd (Ir < Ir0)
Id - Icd > Kcd (Ir- Ir0) (Ir ≥ Ir0)
同时满足上述两个方程时,比率差动元件动作。其中,Id 为差动电流,Ir 为制动电流,Kcd 为比率
制动系数,Icd 为差动电流门槛定值,Ir0 为拐点电流值。
建议将元件中的拐点电流 Ir0 设定为 0.7 倍的高压侧额定电流 Ie,以匝间短路在制动电流小于
额定电流即 Ir < Ie 时,没有制动作用。
差动电流门槛判据不宜过小,建议取 Icd=(0.4~0.8) Ie。
比率制动系数的整定可按以下的公式进行:
Kcd = Kk (KtxFwc + ᇞU + ᇞFph)
其中,Kk 为可靠系数,取 1.3~1.5;Ktx 为同型系数,取 1.0;
Fwc 为电流互感器的允许误差,取 0.1;
ᇞ
U 为变压器调压抽头引起的误差,取调压范围的一半;
ᇞ
Fph 为因电流互感器引起的电流不平衡产生的相对误差,取 0.05;
比率制动系数 Kcd 建议取值范围为 0.3~0.7,误差范围为5%或误差 0.05。
对于三圈变:
Id=|I +I +I |
Ir=|I |+|I |+|I |/2
式中, 分别为三侧电流,均以流入变压器为正方向。
注:
此处制动电流与两侧差动程序有所区别,通常以 I ₁侧为高压侧,I ₃侧为低压侧。这里的电流是考虑过接线
方式换算后的电流。
当 CT 饱和时,比率差动制动系数 Kcd=0.9。
CT 饱和判别:各相电流的二次或者三次谐波值大于基波的 15%。只要三侧某一相电流满足饱和条件,即判
为整个保护 CT 饱和,差动制动系数按 0.9 处理。
在差动保护装置内,变压器各侧电流存在的相位差由软件自动进行校正。变压器各侧的电流互感
器均采用星形接线,并且以指向变压器为同极性。各差动元件的差电流、制动电流均可在“运行状态\
计算量 ”菜单中实时显示,或在主菜单实时循环显示,以便于装置检测和运行监视。
比例差动动作出口接点输出与差速动作出口一致。
PST 641UX 变压器保护装置技术说明书
2.3 二次谐波制动
利用三相差动电流中的二次谐波作为励磁涌流闭锁的判据。动作方程如下:
Max[Ida2, Idb2, Idc2] > Kxb Max[Ida, Idb, Idc]
其中 Ida2, Idb2, Idc2 为 A ,B,C 三相差动电流中的二次谐波含量,Ida, Idb, Idc 为 A ,B,C 三相差动电流,
Kxb 为二次谐波制动系数。当满足上述条件时,闭锁三相比率差动保护。Kxb 一般取为 10%~20%之
间,建议取为 0.15,误差范围为5%或误差 0.05。
各差动元件的二次谐波有效值均可在“运行状态\计算量 ”菜单中实时显示,或在主菜单实时循环显
示,以便于装置检测和运行监视。
2.4 TA 断线
具有瞬时 TA 断线闭锁或告警功能及差流越限告警功能。
TA 断线启动条件为差流大于差动启动电流,在满足下列任何一个条件时,装置退出瞬时 TA 断线判
别:
1) 启动前某侧大相电流小于该侧额定电流的 20%,则不判该侧;
2) 启动后相电流大值大于该侧额定电流的 120%;
3) 启动后任一侧电流比启动前增加。
在上述三个条件均不满足的情况下,如某一侧同时满足以下条件,则延时 9s 判为 TA 断线:
1) 只有一相电流为零;
2) 其余两相电流与启动前电流相等。
如差流大于 15%的差动启动电流,经 10s 延时装置报差流越限,但不闭锁差动保护。这一功能可
兼作保护装置交流采样回路的监视功能。
2.5 非电量保护
从变压器本体来的接点经非电量保护装置重动后,输出一组空接点至 PST 641UX 主保护装置进
行事件记录,并可通过 MMI 将记录上传至后台计算机。
与非电量保护装置相对应,PST 641UX 装置通过投退软压板选择何种非电量信息需要进行记录。
对于“冷却故障”可经控制字 KG1.0 选择是否跳闸,如果选择跳闸,延时时间可整定,当延时到达后,
输出一付跳闸接点“(X3:8,X3:9)”输入至非电量保护装置,起动跳闸总出口。
保护功能及原理
2.1 相间过电流保护
装置在执行三段过流判别时,各段判别逻辑一致,其动作条件如下:
1) I > Idn;Idn 为 n 段电流定值,I为相电流;
2) T > Tdn ;Tdn 为 n 段延时定值。
2.1.1 低电压闭锁元件
低电压元件在三个线电压中的任意一个低于低电压定值时动作,开放被闭锁保护元件。利用此元件,
可以装置在电动机反馈等非故障情况下不出现误动作。当控制字 KG1.7=1 时,对侧复压闭锁投入,
开入 X2:11 为高电平时,低电压元件动作。
2.1.2 负序过电压闭锁元件
当负序电压大于定值时,开放被闭锁保护元件。同低电压闭锁元件共同构成复合电压闭锁元件,与过
流元件构成复合电压过流保护。本元件也可通过控制字决定闭锁任何一段电流保护元件。当控制字
KG1.7=1 时,对侧复压闭锁投入,开入 X2:11 为高电平时,负序电压元件动作。
2.1.3 相间过流方向元件
采用 90接线方式,按相起动,电流方向以指向变压器为正方向,可以通过控制字 KG2.0 选择正
方向或反方向动作区。当方向设置为正方向动作区时,动作范围 Arg(U/I)=-135~+45;当方向设
置为反方向动作区时,动作范围 Arg(U/I)=45~225。各段保护方向元件可由控制字分别投退。
所谓 90接线方式,是假设三相电压对称且功率因数为 1 时,流入方向继电器的电流和电压相位
相差为 90的一种接线方式。
90接线方式电压电流的组合如下表:
序号 输入电流 输入电压
1 Ia Ubc
2 Ib Uca
3 Ic Uab
2.1.4 过负荷元件
过负荷元件监视三相的电流,其动作条件为:
MAX (I)>Ifh,其中 Ifh 为过负荷电流定值。
过负荷元件可通过控制字 KG1.9 设置为告警或跳闸,当 KG1.9=0 时为跳闸;当 KG1.9=1 时为告警。
2.2 零序过电流保护
当零序电流用作跳闸或告警时,零序电流可以由运行参数中的控制字一的 KG1.7 位选择零序电流由外
部的零序 CT 引入,或者由软件自产生成,装置默认为零序电流外接。
满足以下条件时出口跳闸:
1) 3I0>I0n,I0n 为接地 n 段定值(n 为Ⅰ或Ⅱ);
2) T>T0n,T0n 为接地 n 段延时定值;
3) 方向元件投入时,满足方向动作条件。





留言列表